
A. Why do things bounce?
If you have been following the pattern of chapters so far, you might be expecting an “underpinnings” chapter next. Well, the next topic doesn’t need a whole chapter of underpinning, but this first section does indeed give some background information for the musical applications in the ensuing sections. The questions of interest all involve collisions, bouncing and buzzing.
We have already said a little about the mechanics of bouncing, when we discussed impact hammers for frequency response measurement, back in section 2.2.6. In order to get a first impression of how hammers behave we used a very crude approximation: we allowed for the mass of the hammer and an effective stiffness acting between this mass and the structure being tapped, but we treated that structure as being rigid. We did not allow for the fact that the structure would vibrate in response to the tap — which is of course the point of tapping in the first place, whether we are thinking of a vibration measurement or a percussionist hitting a drum or a marimba bar. In the course of this section we will rectify this omission.
A particularly simple kind of collision involving bouncing is illustrated in Fig. 1. This shows two identical steel balls, suspended from a frame so that they can only move along a circular arc. We start with one ball stationary, and we release the other from a height. They collide, and the result is that the moving ball stops dead, while the stationary ball moves off with the same speed that the moving ball had before the collision. The second ball swings out and then returns, and the process repeats in the opposite direction.
A variant of this example is shown in Fig. 2. This shows the same toy as in Fig. 1, but now there are five identical balls. We drop a ball at one end, and the ball at the opposite end flies off — but apparently without the balls in between moving at all. There is a simple way to see why this behaviour could have been anticipated. Suppose there was a very small space between each ball and the next one. When you drop the first ball, the first thing that happens is exactly the same as in Fig. 1: the first ball stops dead, and the second one moves off at the original speed. But in a very short time this ball will hit the third ball. The second ball, in its turn, will stop dead while the third ball moves off. This process would be repeated all the way along the chain, however many balls we had, until the last ball is launched. This one doesn’t have another one to hit, so it flies off, swings upwards, returns, and repeats the process in reverse.
One way to think about the result of the first impact seen in Fig. 1 is that we have used a mass (the right-hand ball) to strike a pendulum. This caused the pendulum to vibrate, in the rather stately way that a swinging pendulum does. It has only a single vibration frequency, and we saw a half-cycle of that vibration before the ball returned, and a second impact occurred with the original mass. But if we had moved the first mass, our “striker”, smartly out of the way, the pendulum would have continued to swing. This is a simple model for what happens when a percussionist hits a marimba bar, or an acoustician hits a violin bridge with a small impulse hammer in order to measure its vibration response. In both cases, multiple impacts are usually not wanted (for reasons we will explore shortly). You want the percussion beater or the impulse hammer to rebound out of the way, leaving the structure free to vibrate.
But there may also be a conflicting requirement. If you want to make the loudest sound on the marimba, you would like to put as much energy as possible into the vibration. You supply a certain amount of kinetic energy in the moving beater, just before it strikes. The most you could possibly hope would be for all that energy to go into vibration of the struck object. This is exactly the situation we saw in Fig. 1. The first ball transferred all its kinetic energy to the second ball, the swinging pendulum. The first ball did not rebound so as to get out of the way, and a second impact followed shortly afterwards. If something similar happened to the marimba player, they might describe the result as a “buzz” or as “chattering” of the beater. For practical purposes, we perhaps need a compromise: transfer a reasonable amount of kinetic energy, but allow a clean bounce.
There is a third important factor: the frequency spectrum of the force applied by the bouncing beater, which will determine the brightness or mellowness of the resulting sound. We will see shortly that there is an interesting interaction between the three factors, linked to the design of the beater and also to the vibration characteristics of the object you are tapping. This interaction plays out somewhat differently in different applications: we will find rather different requirements for an impact hammer for an acoustic measurement, the choice of beaters or drumsticks for a percussionist, and the design of a suitable clapper for a church bell.
First, a reminder of the simple calculation of the behaviour of a bouncing hammer from section 2.2.6. The hammer is only in contact with the structure for a very short time, but during that time we know that a force must act to prevent the hammer-head from penetrating into the structure. The simplest idealisation of that force is to imagine a very stiff spring separating the two components. In the case of our bouncing steel balls, for example, this contact spring force is provided by small deformations of the steel in a tiny region around the contact, as indicated in a sketch in Fig. 3. For the purposes of a simple model we can replace this by a contact spring joining two rigid balls, as sketched in Fig. 4.


During contact, we now have the two rigid masses linked by a spring. This combination will produce a resonance frequency, as usual — it is called a contact resonance. At the moment when contact begins, the balls are moving towards one another, so while they remain in contact the spring force will follow a sinusoidal waveform at the resonance frequency. If the balls were sticky so that they remained together thereafter, the result would be the dashed curve in Fig. 5. But in the absence of stickiness, the force can only be compressive. Once the model calls for a tensile force, we know that the balls will in fact separate. So (within this simple model) the contact force during a single impact should follow a half-cycle of the sinusoidal wave, as shaded in red in Fig. 5.

We can find the corresponding spectrum of the contact force by calculating the Fourier transform of this half-cycle of sine wave: the details were given in section 2.2.6. Two typical examples are shown in Fig. 6, reproduced from Fig. 3 of that section. The plot shows results for two different values of the contact resonance frequency. For the lower frequency (red curve), the amplitude of the force spectrum is only high up to about 700 Hz, while for the higher frequency (black curve) it extends up to around 4 kHz. In both cases this effective bandwidth is a bit more than twice the contact resonance frequency, something to bear in mind for later in this section.
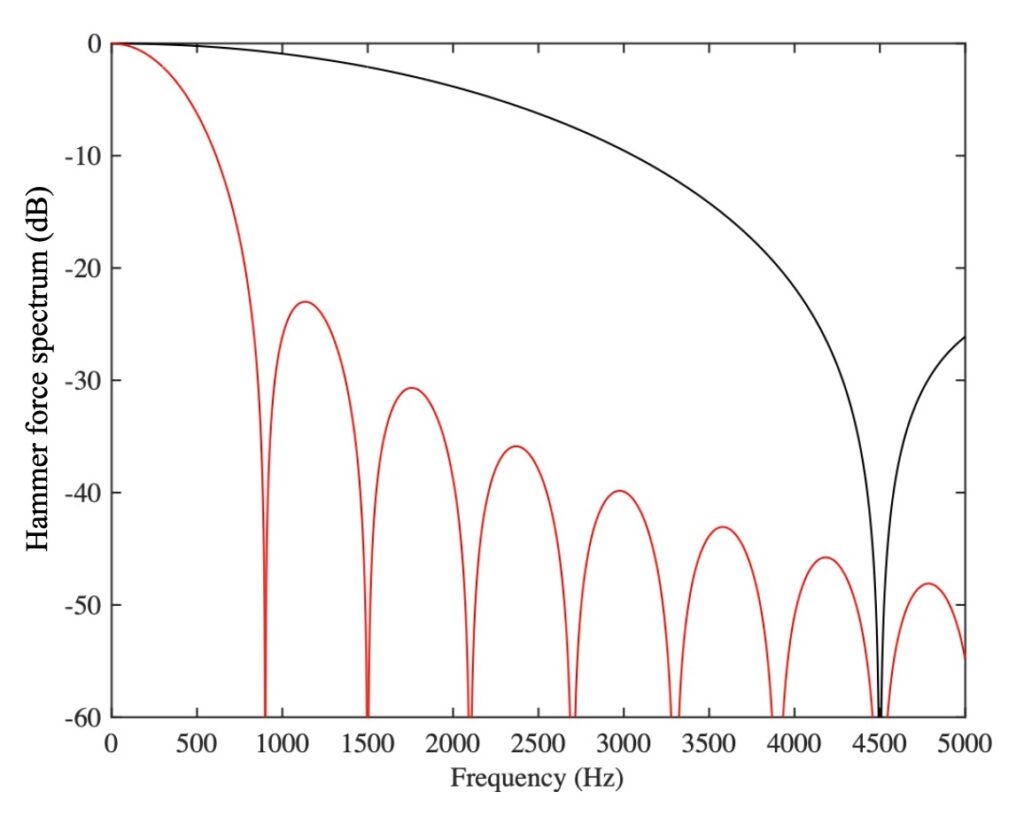
The resonance frequency is determined, as usual, by the ratio of the contact stiffness to the mass. So a low stiffness or a high mass tends to give a low resonance frequency, and correspondingly low bandwidth. A low mass or a high stiffness gives the opposite result, and a high bandwidth. In other words, a heavy, soft beater gives a more gentle, mellow tone from a struck object, while a light, hard one gives a crisper, brighter sound: exactly as every percussionist knows.
B. The missing ingredients
So far, so good: the simple model gives us some plausible and useful information. However, there are four separate reasons why it is incomplete, and therefore potentially unrealistic. We will outline all four issues, and then explore the consequences using computer simulations of a model problem which will allow us to add them in one at a time.
For the first missing ingredient, look back for a moment at Fig. 1. Without writing down any equations, we can glimpse an important aspect of the underlying physics of collision. Because the two balls are identical and the collision is exactly aligned along the line joining the centres of the balls, everything is symmetrical. After the first collision the ball that was initially stationary moves off with (almost exactly) the same speed that the moving ball previously had, and this tells us two things: the total kinetic energy stays the same, and the total momentum stays the same. (Both kinetic energy and momentum are calculated from the mass and the speed of the balls. Since the balls have the same mass and the speed stays the same, both quantities must be the same before and after the collision.)
However, I have glossed over something. Momentum really is conserved in a collision, but kinetic energy is not quite conserved: some energy will always be lost. If nothing else, the audible “click” of the bouncing balls means that a small amount of energy has been carried away in the form of sound waves. With our steel balls the loss is very small, but if the balls had been made of something like wood a higher proportion of the energy might be lost, mainly converted into heat associated with the contact deformation sketched in Fig. 3. The ratio of kinetic energies before and after a collision can be used to define a coefficient of restitution which can then be incorporated into a simulation model: some details of this and other aspects of the mathematical modelling of more realistic collisions are given in the next link.
The second missing ingredient also concerns the details of what happens near the contact point. As sketched in Fig. 4, I introduced a contact spring to represent the force causing the rebound. So far, I have implicitly assumed that this is a “normal” spring obeying Hooke’s law: force proportional to displacement of the ends of the spring. But mathematical modelling of the deformation and consequent force during an impact between two spheres, for example, makes a different prediction. The analysis was first carried out by Heinrich Hertz (the same German scientist that the unit of frequency is named after), and so the behaviour is known as “Hertzian contact”. Some details were given in the previous link, but the main conclusion is that in place of a linear contact spring we should use a nonlinear spring, in which the force rises more rapidly than the linear relation given by Hooke’s law. This nonlinear spring makes mathematical predictions much more difficult, but it is very simple to incorporate into a numerical simulation model.
The third missing ingredient is something we mentioned earlier in this section. The whole point of hitting a percussion instrument, for example, is to make a noise. The instrument starts to vibrate as a result of the collision, and of course this influences the details of the collision process. Kinetic energy is transferred to this vibration, bringing into play additional degrees of freedom to describe the vibration modes of the struck object.
The fourth missing ingredient is closely related to the third: the impact hammer or drumstick will also be set into vibration by the contact force. It is a “well-known fact” among percussionists that different sticks will produce different sound. We have already seen that the mass and contact stiffness can make a big difference to the spectrum of contact force, and hence to the sound. But do the vibration resonances of a drumstick also play a significant role? The previous link shows how the effect of vibration, both of the struck object and of the drumstick, can be included in a simple simulation model.
C. Simulation results for hitting a rigid surface
To explore the influence of these various factors we will look at a simple model system, vaguely resembling a percussion instrument like a cymbal being hit with a drumstick. The “instrument” is a rectangular thin plate, hinged round its boundary, and the “drumstick” is a hinged-free bending beam which hits the plate (through a contact spring) with its free end. The system is sketched in Fig. 7, and some details of how the model has been implemented in the computer were given in the previous link. This model is not meant to be an accurate representation of a real musical instrument, or of a drumstick and the way a drummer really holds it — we are looking for qualitative insights by varying the model parameters to get an impression of, for example, the circumstances that will lead to multiple impacts between the plate and the drumstick.

The relevant vibration behaviour of the plate and the drumstick will be adjusted by specifying the total mass and the lowest vibration resonance frequency of each. Other details, such as the assumed aspect ratio of the plate, the striking position on the plate, and the damping factors for both plate and drumstick will be kept fixed (if you are curious, they were specified in the previous link).
The first step is to verify that the model reproduces the behaviour sketched in Fig. 5 when the plate is effectively rigid, and the lowest resonance frequency of the stick is so high that it doesn’t affect the behaviour. Specifically, we make the plate mass 500 metric tons, and the first stick resonance 10 kHz. We also assume a linear contact spring, as in the theoretical calculation. The red curve in Fig. 8 then shows the computed waveform of contact force for a particular choice of the stick mass and contact stiffness. It does indeed show the expected shape, a half-cycle of a sine wave before a clean bounce occurs and contact is lost.

The blue curve in Fig. 8 shows what happens if we replace the linear contact spring with a nonlinear Hertzian spring, with a stiffness chosen to give more or less the same contact time. There is still a single, symmetrical pulse of force, but the shape is subtly different. At the moment of first contact, the force builds up less abruptly than with the linear spring. But the force grows progressively more steeply a little later in the pulse, a direct result of the “hardening spring” behaviour.
We can see a different comparison between these two force pulses if we take the FFT and look at their frequency spectra: the results are shown in Fig. 9, using the same plot colours as Fig. 8. The spectra are shown on a logarithmic (dB) scale, normalised in the same way as Fig. 6 so that the value tends to zero at very low frequency. For both pulses, the spectrum looks generically similar to Fig. 6: high values restricted to a relatively narrow band of low frequencies, then a pattern of sharp dips and secondary peaks with decreasing height. We can see that the Hertzian spring (blue curve) gives a slightly wider bandwidth at low frequency, and that the frequencies of the secondary peaks are all a little higher, while the peak heights decrease more rapidly (a consequence of the more gentle start and end of the pulse).

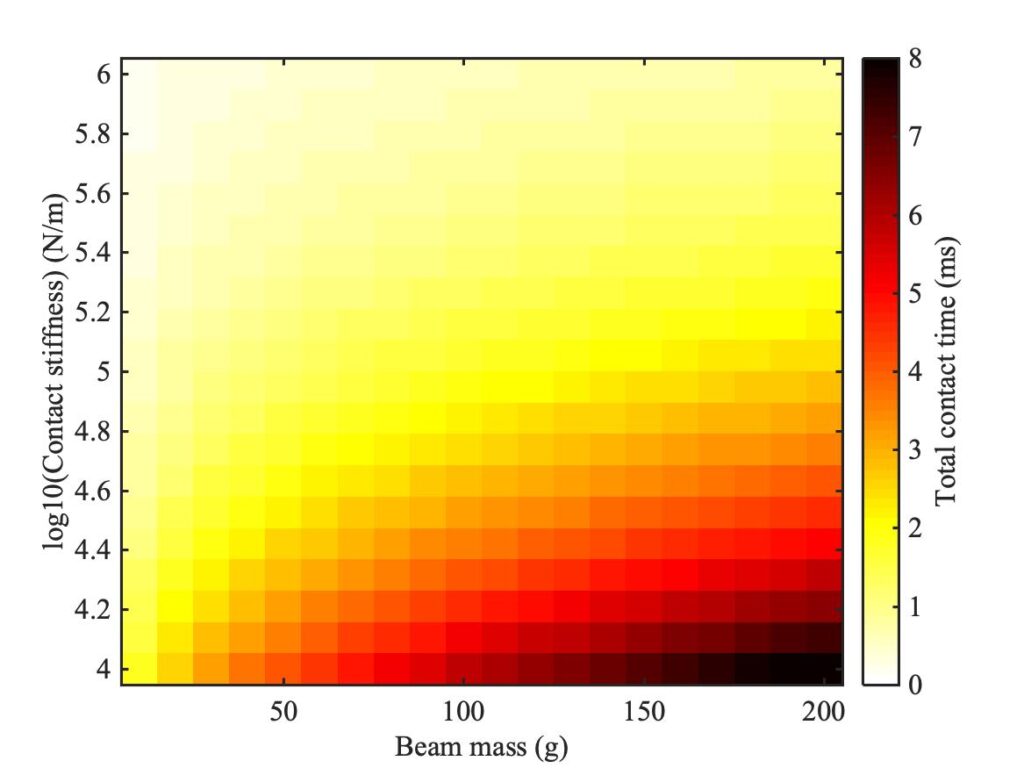
It is useful to see a broader view of how things change when the drumstick properties are varied. If we take a range of values of the mass and contact stiffness, we can compute a grid of cases and then show the results in graphical form rather similar to the “playability plots” we used earlier when talking about bowed string and wind instruments. Figure 10 shows the contact time, for a range of stick masses up to 200 g, and for a wide range of linear contact spring stiffnesses. (Because of the wide range, varying over a factor of 100, a logarithmic scale has been used on the vertical axis.) The colours show a curving pattern, which for this preliminary case simply follows the contour lines of the contact resonance frequency.

Figure 11 gives an indication of how the force spectrum varies over the same grid of simulated cases. The colours here show the spectral centroid, which gives a simple guide to the frequency content of each force waveform. The curves mark out the same contour lines of contact resonance frequency as in Fig. 10. Comparing Figs. 10 and 11, we see the expected behaviour: a light stick with a stiff tip gives a short contact time and a high spectral centroid implying a bright sound, while a heavy stick with a soft tip gives a long contact time, a lower spectral centroid, and a more mellow or muffled sound. However, at this stage there is no “sound”, because we are hitting an essentially rigid surface. Shortly, we will relax this assumption and hear some sound examples.

Figures 12 and 13 show corresponding plots with a Hertzian contact spring. This time we do not have a simple mathematical result for how the contact force behaves, but in fact both plots look broadly similar to Figs. 10 and 11 for the linear spring. The same trends are followed, and you have to look rather carefully to spot the subtle differences in the shapes of the contours mapped out by the colour shading. Provisionally, then, the nature of the contact spring doesn’t make a huge difference to the predicted behaviour.

D. Simulations with flexible plates
If we make our plate or our drumstick (or both) have more realistic dynamic behaviour, things immediately get more complicated. As a first step we will change the plate behaviour, leaving the drumstick still essentially rigid. Before showing detailed simulation results for this case, though, it is useful to introduce an approximate argument which tells us something important about what we can expect to see.
The basis of the argument is something we mentioned at the start of this section, when we talked about the transfer of kinetic energy from a moving “beater” to vibration of the structure which is struck. Every vibration mode that is excited takes some of the kinetic energy that the drummer put into the moving drumstick. Perhaps this makes it intuitively plausible that there might be a limit to how many modes can be strongly excited before the supply of kinetic energy is “used up”.
This idea proves to be correct — the details are explained in the next link. The argument makes use of the force waveform shown in Fig. 5. We have already seen (see Fig. 6) that the frequency bandwidth associated with a pulse like this depends on the contact duration, or equivalently on the contact resonance frequency. When a force pulse like this is applied to a given structure, it is straightforward to calculate how strongly each mode will be excited.
The total kinetic energy of the vibrating structure can then be calculated. It depends on the contact resonance frequency, and there is a threshold value of the contact resonance frequency above which the vibrating structure would require more kinetic energy than is available. This puts a limit on the shortest contact time that is possible if the drumstick is to rebound. At the threshold the incoming drumstick would be stopped dead by the impact (just as we saw with the steel balls in Figs. 1 and 2). A second impact is almost certain to follow, when the vibrating structure returns and hits the stationary drumstick.
We will illustrate with results for two different vibrating systems. First, we look at an example of the vibrating plate described earlier (see Fig. 7), chosen to have total mass 200 g and a lowest resonance frequency 100 Hz. This plate will be impacted at the four different points shown in Fig. 14, and the resulting threshold values of the contact resonance frequency are shown as a function of the “hammer” mass in Fig. 15. Because the mass and the threshold frequency cover a very wide range, logarithmic scales have been used on both axes.


All four curves show a falling trend — a heavier hammer means that the threshold frequency is lower. Three of the tapping positions give rather similar results (the blue, green and black curves), but the position close to the edge of the plate (the red curve) shows a significantly higher frequency over the entire range. In other words, it is easier to excite a wide bandwidth of response in this plate by tapping close to an edge. It is important to recall that this plate has fixed edges all the way round, so that the plate “feels” relatively rigid for a tapping position near the edge.
This behaviour contrasts with our second example, a vibrating beam with free ends, like a marimba bar. The system, sketched in Fig. 16, is given the same total mass and the same lowest resonance frequency as the plate. Again, it is tapped at four different positions, giving the threshold results plotted in Fig. 17. All four curves show a falling trend again, but the shape and position of the curves is different from the ones in Fig. 15: changing the system you tap can make a big difference to the bandwidth you can excite with a given hammer. The main reason behind this contrast is the fact that the resonances of a plate come thick and fast after the first one, whereas the resonances of a bending beam are spaced progressively wider apart (see section 4.2.4 for some detailed analysis of this difference of modal density).


The other contrast with Fig. 15 lies in the position of the red curve relative to the others. Again this red curve is associated with tapping near the edge of the structure — in fact, right at the edge in this case. For the beam, the red curve lies below the others rather than above them as it did for the plate. The main reason this time is not to be sought in the difference between plates and beams, though. Instead, the important difference is in the edge conditions. The plate was fixed at the edge, while the beam is free at its ends. So now the red curve is the result of tapping at a position where the structure “feels” most floppy. This makes it harder to avoid multiple impacts.
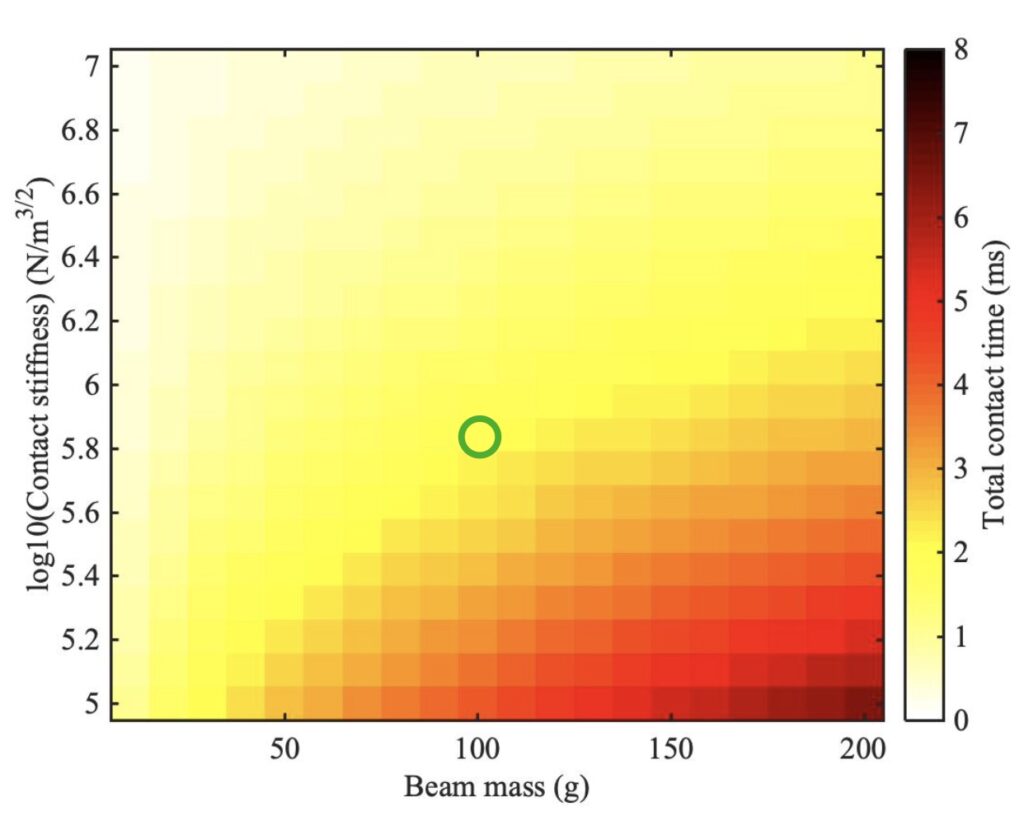
Now we are ready to see some simulation results for the plate system. If the total mass of the plate is set to 2 kg, with a first resonance frequency at 100 Hz, the equivalent of Fig. 10 now looks like the plot in Fig. 18. Virtually nothing has changed: this plate is still heavy enough that the bouncing process is not affected significantly. But if we reduce the mass further to 200 g as in the case studied in Figs. 14 and 15, the result is shown in Fig. 19: this time something looks obviously different, especially in the upper right-hand region of the plot. To see what has happened, Fig. 20 shows a map of the same grid of simulations, coloured black where there was a single, clean bounce and in colours where a multiple impact of some kind occurred. These multiple impacts occur throughout the region that looked different in Fig. 19.


The colour scale in Fig. 20 indicates the ratio of the contact stiffness to the threshold value calculated by the approximate argument, as in Fig. 15. Where the pixels become white, the approximate criterion has been reached or exceeded. We can see in the plot that there is a substantial range of contact stiffness for which the simulations predict multiple impacts of some kind although the limiting stiffness from the approximate argument has not been reached. However, the general shape of the contours of these intermediate colours follows the trend marked by the edge of the patch of white pixels, so the approximate argument does give a useful indication of the pattern.
Some examples of the shape of the contact force waveforms for different plate masses are shown in Figs. 21 and 22. The red curve in Fig. 21 is the same as the red curve in Fig. 8, showing the half-sine shape when the impacted plate was effectively rigid. The blue curve shows the result for the same case with the plate mass 2 kg as in Fig. 18, and the green curve shows the result for the 200 g plate as in Fig. 19. The green circle in Figs. 19 and 20 marks the pixel corresponding to these three waveforms. The blue curve has slightly smaller magnitude than the red curve, because of energy transfer to the plate, but otherwise the pulse shape looks very similar. Comparing with Fig. 20, this pixel lies just above the region where single impacts occurred for the 200 g plate, and the green curve shows the kind of behaviour we might have guessed: a double-humped shape, but not quite losing contact in between to give multiple impacts.

Figure 22 shows corresponding results for the pixel marked by a black circle in Figs. 19 and 20. The red and blue pulses in this plot show a shorter contact time than the corresponding ones in Fig. 21, as expected with the higher contact stiffness. Looking at Fig. 20, we see that this pixel lies in the white region for the 200 g plate, where the criterion based on kinetic energy has been exceeded. The plot confirms this. The green curve shows a rather ragged waveform, with three separate impacts. There is a significant delay before the third impact: the drumstick had to wait for the vibrating plate to come back and hit it before it was thrown off, away from any further impacts.

Figures 23 and 24 show the corresponding frequency spectra to Figs. 21 and 22 respectively, plotted in the matching colours. In both cases we see that as the impacted plate gets lighter, the dips in the spectrum get shallower. For cases in which there is only a single impact, the relatively subtle modification to the pulse shape from impacting a vibrating plate has resulted in a smoother spectrum. But the green curve in Fig. 24 shows more ragged behaviour, which is perhaps not too surprising. We will come back to these observations in a bit — they have implications for measurements using an impulse hammer.


You may be wondering what these simulated plate impacts sound like. Some examples are given in Sounds 1—5, corresponding to the five cases marked by circles in Fig. 20 for the 200 g plate. In each case, what you are listening to is the waveform of plate velocity at the struck point. Sound 1 is the datum case, marked by the green circle and lying in the middle of the diagram. Sounds 2 and 3 illustrate what happens if we keep the same contact stiffness but vary the hammer mass: Sound 2 goes with the left-hand blue circle, and Sound 3 with the right-hand one. Sounds 4 and 5 give the corresponding comparison for keeping the mass the same but varying the contact stiffness. Sound 4 corresponds to the blue circle at the bottom of the diagram, Sound 5 to the black circle at the top.
All five examples give a recognisable impression of the kind of sounds you might make by hitting a metal plate with a stick of some sort. They are quite “unmusical” sounds, because this plate does not represent a carefully tuned percussion instrument — there are no harmonic relationships between the resonance frequencies (look back at Chapter 2 for a reminder of why that is important). Compared to the datum case in Sound 1, Sound 2 has a shorter contact time because of the lower mass, while Sound 3 has a heavier mass and a longer contact time. The effect of those changes on the degree of “brightness” is clear. Sounds 4 and 5 give a somewhat similar contrast in brightness, this time caused by a change in contact stiffness rather than mass.
Sound 5 stands out as being a bit “rough”. Recall that this case falls in the white region of Fig. 20, where the approximate criterion for double bouncing has been exceeded. We saw the resulting force waveform in the green curve in Fig. 22, and now we hear the consequence of those multiple impacts for the sound. It is easy to believe that under some circumstances a percussionist would not want this kind of rough sound. To avoid that, Fig. 20 shows that they need to choose a lighter stick or one with a softer head: starting from the black circle you can escape the white region either by moving left or by moving down.
E. Simulations with a flexible drumstick
Now we can add the final ingredient to the model, by allowing the “drumstick” to have vibration resonances in the frequency range of interest. We want to plot an image similar to the earlier ones, so we still want the drumstick mass to be a variable. I have chosen a simple approach: the change in mass is achieved by choosing different diameters of circular rod, assuming that the drumstick is always made of the same material. The theory of bending beams (see section 3.2.1) then tells us that the resonance frequencies of the beam scale proportional to the square root of the mass (so thinner, lighter beams have lower resonance frequencies, as you would expect). For a specific model that might be in the right ballpark for a normal drumstick, I have chosen the lowest frequency to be 1 kHz when the mass of the beam is 30 g, and then used the scaling relation to calculate the frequency for other masses.
Running a set of simulations over the same range as earlier figures gives the plot shown in Fig. 25. The results look very similar to Fig. 20 over most of the plane, but at the left-hand side something new has appeared: instead of black pixels down the left-hand side, we see a lot of red. This red colour is a bit misleading, though. I have calculated the threshold value of contact stiffness exactly as before, using the approximate argument based on the vibration modes of the plate. But really we should include the modes of the drumstick as well in this calculation — the previous link explains how to do this. When that is done, the result is shown in Fig. 26. An additional patch of white pixels has appeared in the top left corner, and the pattern of the other colours now tracks the white region in very much the same way as found earlier.
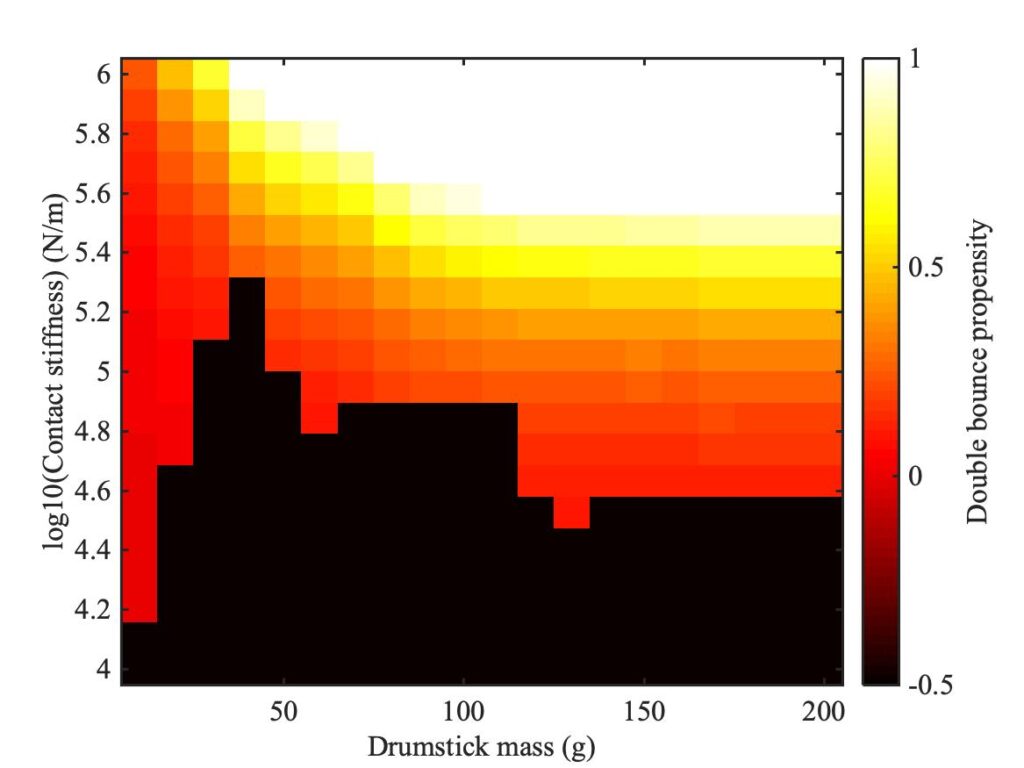

We deduce that the vibration of the drumstick makes multiple contacts more likely, especially if the stick is quite light. To see the consequences, two cases have been chosen to show in detail. They are marked with circles in Fig. 26: both involve the “nominal” 30 g drumstick, with a first resonance at 1 kHz. One is not far above the black pixels, the other is up in the white region. For the first of these, marked by the green circle, the waveform of contact force is shown in red in Fig. 27. The plot also shows the corresponding case from Fig. 20, with the rigid drumstick. The red waveform shows a clear double peak, although it does not lose contact in between so it is not strictly a double bounce.

Figure 28 shows the frequency spectra of these two force pulses, and it also shows the spectrum of the resulting plate velocity in the two cases. The colours match Fig. 27: both spectra for the flexible drumstick are shown in red, and both for the rigid drumstick are in blue. The smooth curves show the force spectrum, and the obviously jagged curves show the plate velocity, with peaks at all the resonance frequencies.

This comparison of spectra tells an interesting story. Look first at the two smooth curves. Near the drumstick resonance at 1 kHz, the red curve has a significant dip — it falls over 15 dB below the blue curve. This difference is manifested directly in the spectra of plate velocity: if you look carefully, you can see that the peak heights in the red curve fall well below those of the blue curve in this frequency range. What has presumably happened is that the first resonance of the flexible drumstick has had a strong influence on the spacing of the double hump in Fig. 27. Even though the total contact duration is only about 1 ms, this is enough for the stick resonance to make itself felt in the force spectrum.
Figures 29 and 30 show the same comparisons for the case marked with a black circle in Fig. 26. Both force waveforms are now very jagged, as we would expect since we are up in the white region. At first glance the rigid stick (in blue) shows more drastic effects, with several separate contacts. The flexible stick (in red) has only a single contact, but it lasts longer than the main pulse in the blue waveform and has a more complicated shape. When we look at the comparison of spectra in Fig. 30, we see an important consequence of this complicated shape. The force spectrum for the flexible stick (smooth curve in red) shows a dip around the resonance frequency at 1 kHz, very similar to the case shown in Fig. 27.


The conclusion is that the first resonance of the drumstick has a surprisingly consistent effect on the two cases. The obvious next question is: “can you hear it?” Sounds 6 and 7 allow you to listen to the two plate velocity waveforms for the case shown in Figs 27 and 28. Sound 6 is for the flexible drumstick, Sound 7 the comparison for the rigid one. Sounds 8 and 9 give the same comparison for the cases shown in Figs. 29 and 30. You may need to ensure good audio reproduction to hear this effect clearly (headphones may work best), but I think you will agree that in both cases you can hear a difference of sound between the flexible and rigid drumsticks. Furthermore, it is a rather similar kind of difference in both cases.
It seems a good guess that you are hearing directly the effect of reducing the sound from the vibrating plate near the lowest resonance of the flexible drumstick. Of course, other details may also influence the sound (such as the other resonances of the stick). But tentatively, this simple example lends support to the claim of percussionists that different sticks give different sounds. Now, we must not over-interpret this example. Drummers do not hold their sticks at the end like our model, and the “drumstick” model is very crude compared to the design of real drumsticks (which usually taper and have a distinct “head”). These factors will influence the resonance frequencies and the effective masses of those resonances as felt at the striking point. But the idea that one, and possibly more, of the stick resonances can sometimes show up in the sound as audible dips in the spectrum surely deserves to be investigated in more detail.
There is very little scientific literature about the vibration of real drumsticks: the only measurements seem to be contained in a Masters thesis by Andreas Wagner [1]. Figure 31 reproduces some of his results: measured resonance frequencies and mode shapes for two commercial drumsticks. Each stick was supported by a soft clamp at the balance point or fulcrum point, which is a position that drummers are often recommended to hold a stick for playing involving fast bouncing. The drummer’s fingers will no doubt add significant damping to any vibration mode which is moving at this point, but intriguingly both sticks show a mode near 900 Hz with a rather extended near-nodal region around the fulcrum. This mode might be a strong candidate for influencing the timing of multiple bounces, and thus affecting the sound of the struck object.

F. Coda: implications for impact hammer testing
So far, the discussion of bouncing has mainly been in the context of the sound of a struck percussion instrument. However, the modelling and analysis are also relevant to something else we have met in earlier chapters: the use of an impact hammer to excite a structure, not in order to make a particular noise on it but as part of the process of measuring something like the input admittance. There are subtleties of detail (some of these have been discussed in sections 5.1.1, 10.4 and 10.4.2), but in essence such a measurement goes like this. The structure is tapped, and the force waveform and the structure’s response are collected into a computer. Both are converted to frequency spectra by using the FFT, then finally the required frequency response is obtained by dividing the response spectrum, frequency by frequency, by the force spectrum.
The useful frequency range of such a measurement depends on the force spectrum. We need to divide by that spectrum, so we certainly can’t tolerate frequencies at which it is zero. But there is a more insidious problem: all measurements contain some noise, so in practice we can only use frequencies for which the force spectrum rises significantly above the “floor” determined by that noise.
If the impact gives a single, clean pulse rather like the idealised version from Fig. 5, the force spectrum will look like a somewhat noisy version of the examples in Fig. 6. Everything should work for frequencies within the first “hump” of the force spectrum, but we won’t be able to get useful information as we approach the frequency of the first zero in the spectrum. We might or might not get some useful information from frequencies lying near the subsequent peaks in the spectrum, but the level is low compared to the hump at low frequency, and at best the measurements will be noisy and rather unsatisfactory. The conclusion from this, which we have already seen earlier, is that if you want to measure frequency response reliably up to high frequency, you need to achieve a very short hammer pulse: this needs a light hammer, and a high contact stiffness.
The discussion in this section now reveals a snag. Hammers with high contact stiffness are liable to give multiple bounces rather than a single contact, especially if the hammer itself has a resonance within the frequency range you are trying to cover. Does this matter? The force spectra in the red curves of Figs. 28 and 30 suggest a potential problem. Both show a strong dip around the frequency of the “hammer” resonance, determined by the spacing of the “double hump” in a force waveform like the red curve in Fig. 27. This might be a significantly longer time than the duration of a single pulse, so the dip in the force spectrum will occur at a lower frequency than we were expecting and the useful frequency range for the measurement will be reduced.
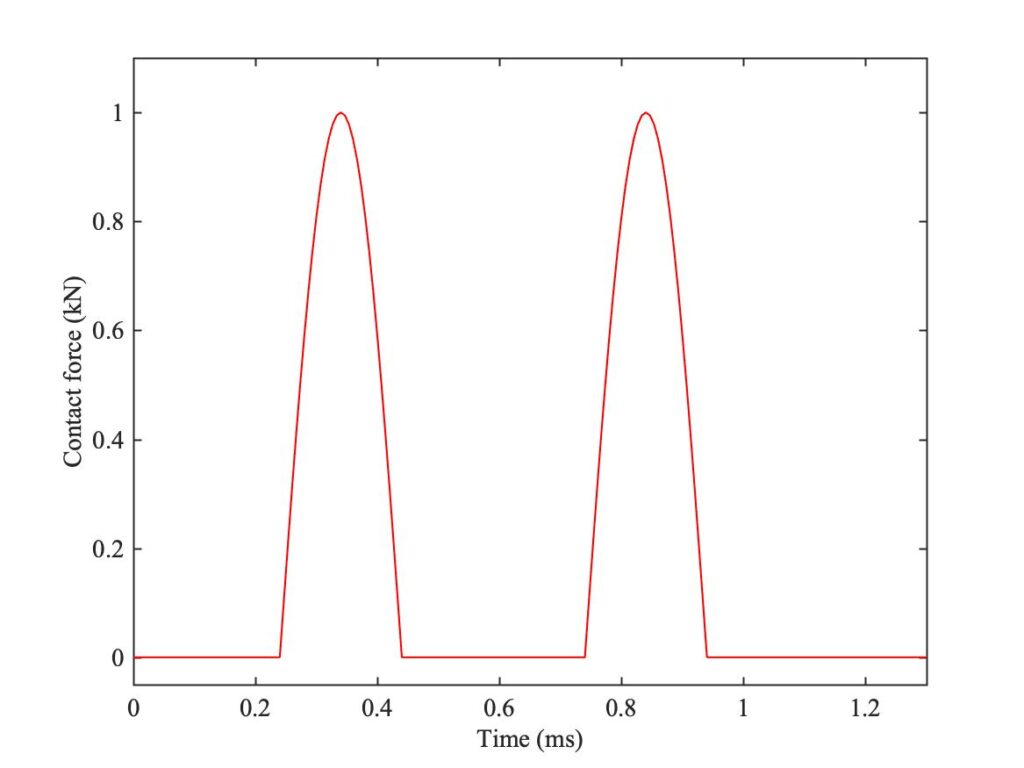
The extreme case arises when a “double bounce” from the hammer produces two pulses of similar height, like the idealised example plotted in Fig. 32. The corresponding frequency spectrum is shown in Fig. 33, and we can see that it has very deep troughs indeed. Whatever the noise floor of the measurement equipment might be, a dip like this is guaranteed to fall below it and thus limit the usable bandwidth of the measurement. The less symmetrical double hump in the red waveform of Fig. 28 gave a far shallower dip, perhaps shallow enough that it still lies above the noise floor. The multiple contacts shown in the green curve in Fig. 22 give rise to the force spectrum shown in Fig. 24, which has a lot of small dips — these will not necessarily be deep enough to cause big problems with a frequency response measurement.

The conclusion is that double bounces from an impact hammer might or might not be tolerated in a measurement, depending on the noise floor of the measuring equipment together with the details of the structure being hit, the vibration behaviour of the hammer, and the consequent symmetry or asymmetry of the force waveform. Any trough in the force spectrum will result in some reduction of the signal-to-noise ratio of the frequency response measurement, but if the effect is not too extreme you may be able to compensate by repeating the measurement more times and getting the advantages of averaging. Reducing the noise level in the measurement equipment always helps, but it is always worth keeping an eye on the force waveform and its spectrum. If you see a double bounce with rather similar pulses, you should expect problems and take steps to change something.
[1] Andreas Wagner, “Analysis of drumbeats — interaction between drummer, drumstick and instrument”, MSc dissertation, Dept. of Speech Music and Hearing, KTH Royal Institute of Technology, Stockholm (2006).